Getting a servo to turn on RPi 400

Thing I have learned:
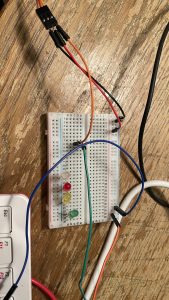
- You don’t need a separate battery pack to power this continuous servo FS90R. You can power it from the 5V pin on the RPi
- I need to remember how breadboards work! The valley down the middle is NOT connected underneath
- I’m still not sure how pulse width modulation works so can’t control the turning well yet
Pics to follow soon
Useful link: https://stackoverflow.com/questions/45150825/control-continuous-servo-motor-with-raspberry-pi-and-python
Code:
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BCM)
GPIO.setup(17, GPIO.OUT)
p = GPIO.PWM(17, 50)
p.start(7.5)
try:
while True:
p.ChangeDutyCycle(7.5)
time.sleep(1)
p.ChangeDutyCycle(12.5)
time.sleep(1)
p.ChangeDutyCycle(2.5)
time.sleep(1)
except KeyboardInterrupt:
GPIO.cleanup()